Computer Based Automatic Go/NoGo Analysis of the Surrounding to Control Autonomous Vehicles.
Our Service:
- Classification and automatic mapping of accessible sites and non-accessible areas in the aerial photo and as GIS data set with exact area size and land cover.
- Visualisation in an Orthophoto Map
- Automatic detection of trees with exact location and tree size
Study Case (download as PDF):

Figure 1: Original RGB Orthophoto from Image/Laser Flight

Figure 2: High Resolution Terrainmodell generated from Laser Point Cloud (blue = low, red = high)

Figure 3: Analysis of First Pulse Laserdata to visualise the Surface Modell (dark green = high, blue = no reflection, partly water bodies).
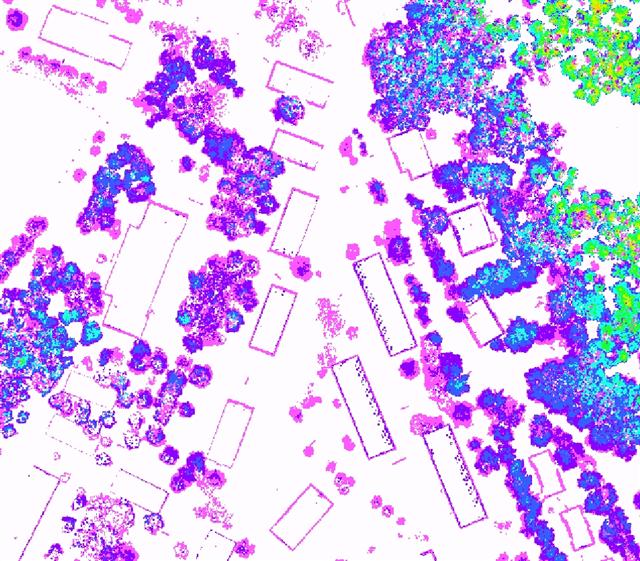
Figure 4: Deifference Modell generated from First Pulse and Last Pulse Laserdata

Figure 5: Edge Detection processed with Image- and Laserdata
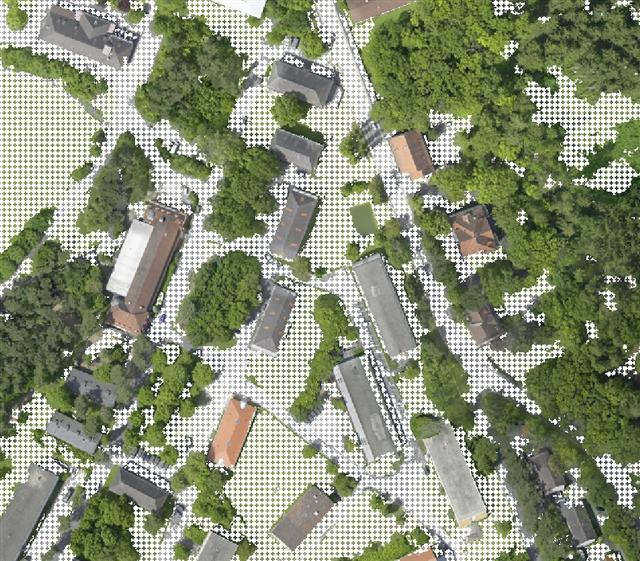
Figure 6: Automatic Classification and Visualisation of "GO" Areas, i.e. of Terrain suitable for crossing with vehicles (illustrated with white dots).

Figure 7: Automatic Classification and Visualisation of buildings (red) and Trees (geen) as part of the "NoGo" Area, i.e. terrain unsuitable to cross with vehicles.